

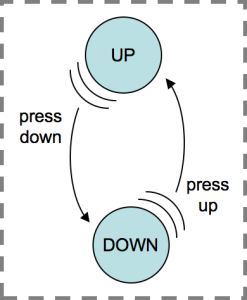
Summary: This is exactly the same switch as in the toggle light switch, shown in more detail. It demonstrates the way you can represent the same control at different levels of detail for different purposes. It also introduces the idea of ‘give‘ and a physigram shorthand for it.
The simple Up-Down physigram for the toggle switch is accurate at one level of detail, but if you try a switch and notice what happens, it does not immediately flick the moment you press it. Instead, as you press, at first it gives a little. If you stop pressing and release it, initially it does just spring back. You need to keep pressing until it gets to a point of no return, usually just over halfway, and then it springs into the new position.
These little ‘gives’ before something moves irrevocably are very useful in helping you to know whether to press an ambiguous door handle down or lift it up, or whether to open a door by pushing or pulling.
Here is a physigram that better catches these half-down and half-up states:

Note that in this diagram we also included self-transitions: pushing the switch down when it is already down does nothing and simply takes us back to the same down state. This was true for the original light switch example, but in the simpler diagram, it was obvious and therefore omitted for clarity.
There is often a decision to be made between including all the details, which may result in a representation so complex that it is hard to understand, and omitting too much detail so that you miss crucial issues. The choice made will depend on the circumstances – who and what it is for. Indeed you might want to represent the same device at different levels of detail for different purposes during the same project.
In fact, to represent this in complete detail you would need to map the exact graph pressure exerted vs. distance moved for the button. Some authors [[ZR14]] have done precisely this, measuring force–displacement graphs for controls, and Eslambolchilar’s cybernetic modelling the human and device together [[Es06]] works at this level of detail.
There are also times when you would like to record that there is ‘give’, but without all of the details.
Here is the physigram shorthand for this switch, with little ‘give’ transitions for the press up and down actions. Note we have again omitted the self-transitions for simplicity.
References
[[Es06]] Eslambolchilar P (2006) Making sense of interaction using a model-based approach. PhD thesis, Hamilton Institute, National University of Ireland, NUIM, Ireland [[ZR14]] Zhou W, Reisinger J, Peer A, Hirche S (2014) Interaction-Based Dynamic Measurement of Haptic Characteristics of Control Elements. In: Auvray M, Duriez C (eds) Haptics: Neuroscience, Devices, Modeling, and Applications: 9th International Conference, EuroHaptics 2014, Versailles, France, June 24-26, 2014, Proceedings, Part I, p 177–184. Berlin, Heidelberg: Springer Berlin Heidelberg, 2014. http://dx.doi.org/10.1007/978-3-662-44193-0_23.